Talk - Adaptive Trajectory Prediction Based on Gaussian Stochastic Processes
Jul 14, 2020
·
0 min read
Abstract
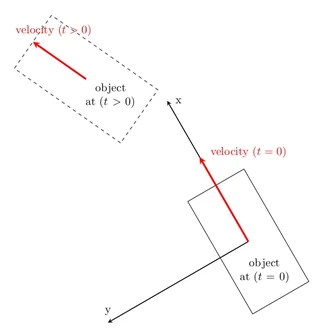
Trajectory prediction is an essential part of many algorithms in autonomous driving. Among its most important applications are behavior planning, collision mitigation, lane keeping and many others. By the stochastic modeling of dynamical parameters of motion the prediction of future trajectories becomes possible. In this document, a regression model using a stochastic approach is developed to successfully predict traffic participant trajectories, and equally important, estimate the prediction’s uncertainty. As the statistical properties of trajectory prediction depend on the traffic scene under consideration, the model is capable of adapting itself to the environment. The model was analyzed on a 400 km long measurement to verify its assumptions.
Location
Bosch Group Hungary
104 Gyömrői út, Budapest, 1103

Authors
Quantitative Researcher
Quantitative Researcher with a PhD in Mathematics, specializing in stochastic modeling, machine learning, and predictive systems for financial markets.
Experienced in probabilistic modeling, Monte Carlo simulation, uncertainty quantification, and statistical validation for data-driven decision-making.
Currently developing intraday energy-market price prediction models and optimal liquidation strategies using machine learning, functional data analysis, and stochastic differential equations.
Interested in market prediction problems where model quality is directly reflected in trading performance and PnL.